
Introduction
Within the last decade, it has become possible to design and create sub-gram miniature robots. The demand of miniature robots comes from the potential for their applications, ranging from artificial pollination to complex surgeries and search and surveillance missions. Miniature robots can have the potential to complete or assist tasks that are difficult for humans (because of their size or vulnerability) to accomplish.
To make miniature robots, the powering mechanism must be as small and lightweight as possible. The most common energy source for normal-sized robots is the use of batteries. However, batteries (along with its additional components needed to power) take up significant weight and space, making it quite impractical.
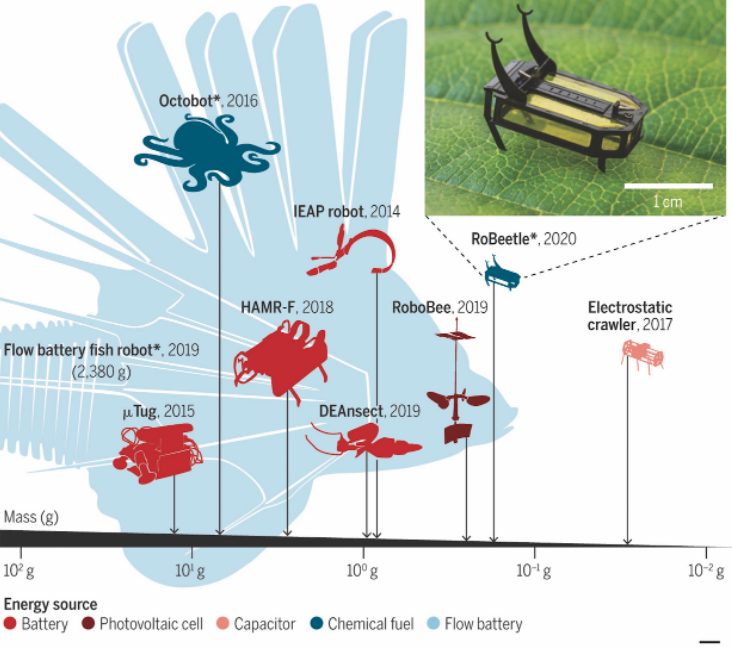
Therefore, some researchers have sought an alternative energy source to create a more efficient and lightweight robot. Here, alternative energy sources range from photovoltaic cells to capacitors and chemical fuels. This article will talk about two specific miniature robots, the RoboBee and the RoBeetle, which are powered by photovoltaic cells and chemical fuels (methanol), respectively. In the next article (Part 2), we will discuss miniature robots that are powered by batteries and capacitors.
RoboBee
The RoboBee is a miniature robot powered by solar power, initially inspired by the biology of a bee. The creation and engineering of RoboBee is led by the Harvard School of Engineering and Applied Sciences and the Wyss Institute, since 2016. RoboBee can fly using artificial muscles that contract when a voltage is applied.
Untethered (independent) flight is difficult for miniature robots because it does not gain much lift force with its size and weight. To alleviate this problem, in 2016, researchers established a way for RoboBee to perch on surfaces to save power during flight. It can perch on surfaces like leaves on a branch using static electricity, and it turns out that perching requires only 1000 times less power than flying.
Next, researchers worked on adapting RoboBee to water. In October 2017, they managed to get RoboBee to swim and propel itself out of the water to regain flight. Because of its small size, the tension at the water’s surface makes it difficult for miniature robots to escape the water. The RoboBee uses a mechanism that gives it a boost at the surface: RoboBee uses water and an electrolytic plate to produce oxyhydrogen (a combustible substance), that is then ignited with a sparker to give momentum.

In June 2019, researchers accomplished untethered flight with RoboBee. They used additional solar cells and two pairs of wings (the latter increased efficiency by 30%). While flight only lasted for 0.5 seconds, this showed the potential of autonomous, untethered flight of microscale aerial robots. At this point, RoboBee was only 0.26g (the smallest drone with about the same size weighs 9g).
Another problem with miniature robots is being prone to external effects such as collisions to walls and obstacles. To solve this problem, in November 2019, RoboBee was reconstructed using electrically driven soft, artificial muscles (soft actuators), which contract whenever an electric field is applied. An eight-wing (four-actuators) model was shown to make the most controlled flight and resilience within cluttered environments.
As seen, repeated efforts and breakthroughs have been made to adapt RoboBee to various environments and to make it more resilient and power efficient. [5][6][7][8][9]
RoBeetle
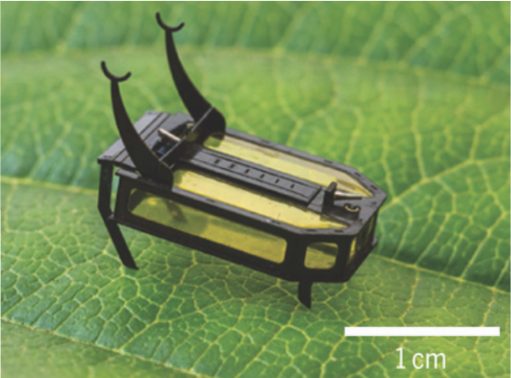
The RoBeetle, powered by methanol, is a recent project by researchers at the University of Southern California, published in August 2020. Methanol has a higher energy density than batteries, and does not require additional electrical components like circuits or wires. Actually, methanol only has an end-to-end efficiency of 0.48%, but when powering objects of such a small size, it turns out that methanol becomes an efficient and compatible energy source. One specialty of the RoBeetle is that it operates completely mechanically.
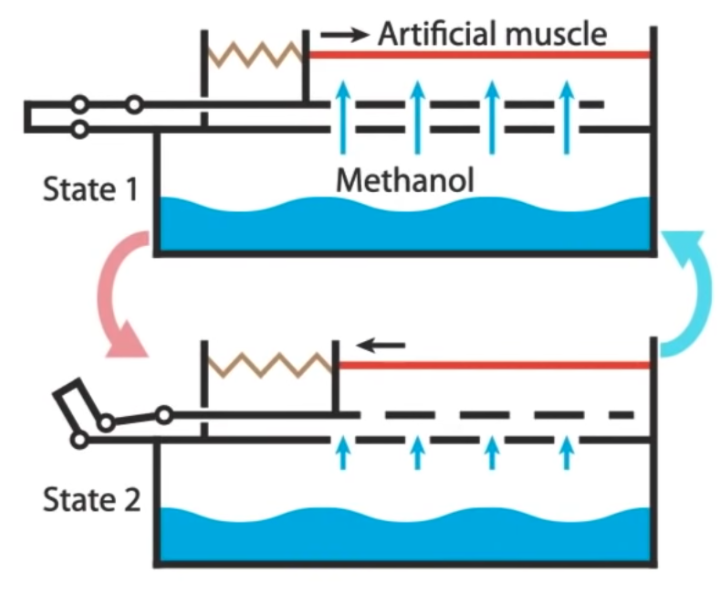
We will discuss the mechanism of RoBeetle’s movement. The body of the RoBeetle is a cuboid shaped tank filled with methanol (combustible in the presence of oxygen). RoBeetle uses nickel-titanium alloy wires, which have shape-memory (can maintain elongation and contraction for a short period of time), as artificial muscles to generate movement. First, as seen in the diagram, evaporating methanol comes in contact with the wires situated above, and combustion heats the wire up making it elongate. Here, the wire is coated with platinum, which acts as a catalyst to speed up the combustion reaction of methanol. Between the wire and the methanol are two plates with slits; the positions match when the wire is contracted (creating an opening), but mismatches when elongated (blocking the opening). This means that when the wire is heated and elongated, the methanol does not come in contact with the wire. The wire then cools down and contracts, allowing the methanol to come in contact again. This process is automatically repeated, creating muscle-like movement, generating movement of the front two legs. With this mechanism, the robot currently reaches a top speed of 0.76mm/s and can maintain power for up to 155 minutes.
The RoBeetle weighs 88mg (size: 15mm), which is only slightly larger than a real beetle (50mg, 10.5mm) and can carry objects up to 2.6 times its own weight (so it can carry things like sensors). It has been shown that RoBeetle can move on slopes and surfaces of varying textures. On the other hand, it currently cannot move backwards or change direction. It can only move forward until it runs out of methanol. There have been suggestions to use pressurized liquid fuels to increase speed and using more intricate artificial muscle systems for better control. [1][2][3][4]
Miniature robots use clever mechanisms to use appropriate energy sources and require careful optimization for maximum efficiency.
[1] Hartley, Charlotte. (2020). “Watch a tiny robot powered by alcohol”. Science, AAAS. https://www.sciencemag.org/news/2020/08/watch-tiny-robot-powered-alcohol. Last Accessed: 2020/08/30.
[2] McGlaun, Shane. (2020). “RoBeetle is a tiny robot that uses methanol for fuel”. SlashGear. https://www.slashgear.com/robeetle-is-a-tiny-robot-that-uses-methanol-for-fuel-24634753/. Last Accessed: 2020/08/30.
[3] IEEE Spectrum. (2020). “RoBeetle: A Micro Robot Powered by Liquid Fuel”. https://www.youtube.com/watch?v=vd6tN19wilQ. Based on Yang, Xiufeng, et al. (2020). “An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle.” https://robotics.sciencemag.org/content/5/45/eaba0015. Science Robotics, AAAS. Last Accessed: 2020/08/30.
[4] Ackerman, Evan. (2020). “Minuscule RoBeetle Turns Liquid Methanol Into Muscle Power” IEEE Spectrum. https://spectrum.ieee.org/automaton/robotics/robotics-hardware/robeetle-liquid-methanol. Last Accessed: 2020/08/30.
[5] Wyss Institute. “RoboBees: Autonomous Flying Microrobots”. https://wyss.harvard.edu/technology/robobees-autonomous-flying-microrobots/. Last Accessed: 2020/08/30.
[6] Simon, Matt. (2019). “What Could Possibly Be Cooler Than RoboBee? RoboBee X-Wing”. https://www.wired.com/story/robobee-x-wing/. Last Accessed: 2020/08/30.
[7] Wyss Institute. (2016). “Using static electricity, RoboBees cling to surface”. https://wyss.harvard.edu/news/using-static-electricity-robobees-cling-to-surface/. Last Accessed: 2020/08/30.
[8] Wyss Institute (2017). “New RoboBee flies, dives, swims, and explodes out of the water”. https://wyss.harvard.edu/news/new-robobee-flies-dives-swims-and-explodes-out-the-of-water/. Last Accessed: 2020/08/30.
[9] Burrows, Leah. (2019). “RoboBee powered by soft muscles”. https://wyss.harvard.edu/news/robobee-powered-by-soft-muscles/. Last Accessed: 2020/08/30.